


- 頭條占地小、質(zhì)量輕、可彎曲、更靈活的機械手臂2021-07-02 作者:本社報道 | 來源:《電氣技術》雜志社 | 點擊率:導語倫敦帝國理工學院REDS實驗室的研究人員,介紹了一種圍繞可鍛結構而不是剛性結構構建的機器人,無需增加額外度數(shù)就能提高手臂的通用性和自由度。該設計使得機械臂不再受制于靜態(tài)管和關節(jié),而可以重新配置機器人,完全按照所需的方式進行設置,并可以隨時隨地輕松地對其進行更改。
隨著科技的高速發(fā)展,近年來各行各業(yè)都能看見機器人的身影,并逐漸改變著人們的生產(chǎn)與生活。其中,大多數(shù)機械臂是由長直管和活動關節(jié)的某種組合構成,因為人類的四肢都是以相同的方式構造的,這是巧妙而高效的設計。通過添加更多的管子和關節(jié)(或自由度),可以提高機械臂的多功能性,但代價是復雜度、重量和成本的增加。
倫敦帝國理工學院REDS實驗室的研究人員,介紹了一種圍繞可鍛結構而不是剛性結構構建的機器人,無需增加額外度數(shù)就能提高手臂的通用性和自由度。該設計使得機械臂不再受制于靜態(tài)管和關節(jié),而可以重新配置機器人,完全按照所需的方式進行設置,并可以隨時隨地輕松地對其進行更改。相關研究成果已在2020年ICRA發(fā)表,題目為“可鍛機器人的設計和工作區(qū)表征”。
圖片來源:倫敦帝國理工學院
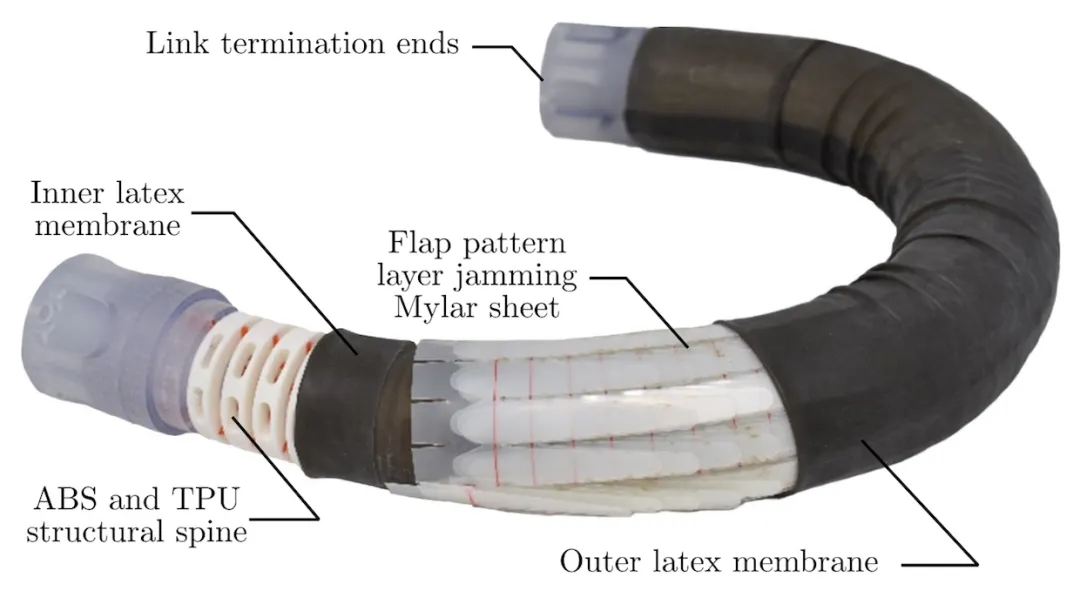
據(jù)介紹,該臂可彎曲部分的內(nèi)部由一層又一層的聚酯薄膜片組成,這些薄片被切成薄片并彼此堆疊,從而使每個薄片與至少11個其他薄片重疊。聚酯薄膜很滑,在大多數(shù)情況下,襟翼可彼此平滑移動,從而可以調(diào)節(jié)手臂的形狀。襟翼被密封在乳膠膜之間,當空氣從膜之間被抽出時,它們相互向下壓使整個結構變硬,將其自身鎖定為您放入的任何形狀。
該系統(tǒng)的優(yōu)點在于,它是軟機器人和剛性機器人的組合,您可以獲得軟系統(tǒng)的靈活性(物理的和隱喻的),而不必處理所有的控制問題。其機械比任何一種系統(tǒng)(如混合系統(tǒng))都更為復雜,但是可以節(jié)省成本、縮小尺寸、減輕重量,并減少所需的執(zhí)行器(往往是故障點)數(shù)量。
研究人員指出,大多數(shù)串行機器人手臂具有6個或更多的自由度(DoF)(通常是旋轉(zhuǎn)關節(jié)),但執(zhí)行任務通常僅需2個或3個自由度。能夠?qū)崿F(xiàn)靈活性和適應任務但保持低自由度系統(tǒng)的簡單機械臂,以及快速開發(fā)用于醫(yī)療應用的可變剛度連續(xù)體機器人,啟發(fā)了他們發(fā)展可延展的機器人的想法。
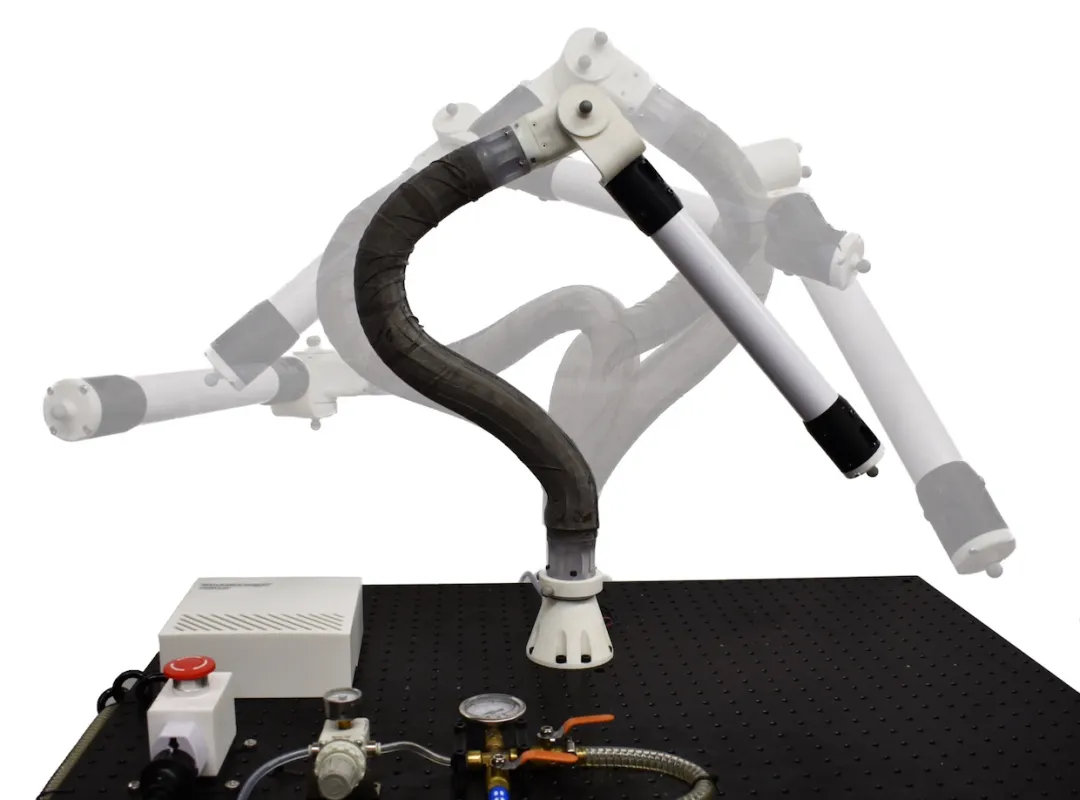
圖片來源:倫敦帝國理工學院
可延展的機械臂可以通過哪些方式提供獨特的優(yōu)勢,哪些潛在的應用程序可以利用這些優(yōu)勢?可延展的機器人能夠完成多個傳統(tǒng)任務,例如拾取和放置或垃圾箱揀選操作,而無需在每個任務中直接使用額外的大量關節(jié),因為可延展的機器人提供了機械臂的靈活性鏈接。
這使得機械手臂外形尺寸更小,包括機器人的重量和占地面積,以及由于更少的關節(jié)構成而降低了動力需求和機器人成本,同時又不犧牲適應性。這使得該機器人成為任何至關重要場景的理想選擇,例如在太空機器人中(節(jié)省的每1公斤都是至關重要的)或在康復機器人中,降低成本以促進采用。
與傳統(tǒng)的萬向節(jié)之間的剛性鏈節(jié)相比,使用可延展鏈節(jié)的缺點是可延展鏈節(jié)的最大剛度比等效的實心鋼制剛性鏈節(jié)要弱得多,這是重點關注的領域之一,因為這將影響機器人運動精度和準確性。
基于此,研究人員創(chuàng)建了現(xiàn)有最大的可變剛度連桿,長度約為800毫米,直徑為50毫米,適用于延展性機器人及中小型工作空間。目前,對這種精度的評估結果是較為理想的,但是由于在封裝膜彎曲時會產(chǎn)生皺紋,因此可能無法在整個可延展鏈節(jié)上獲得均勻的剛度。正如SCARA拓撲結果所證明的那樣,這可能會產(chǎn)生輕微的結構變化,從而導致精度的降低。
機器人有什么辦法知道自己的形狀嗎?潛在地,該系統(tǒng)可以以某種方式重新配置自身嗎?當前,研究人員使用運動跟蹤來計算機器人拓撲,并在機器人的關節(jié)上放置標記。通過使用距離幾何,可以獲取機器人的正向和反向運動學,用來控制機器人的末端執(zhí)行器(抓爪)。理想情況下,研究人員希望開發(fā)出一種不再需要使用運動跟蹤攝像機的系統(tǒng)。
圖片來源:倫敦帝國理工學院
至于機器人自身的重新配置,研究人員稱其為“固有延展性鏈接”,已經(jīng)證明了許多控制連續(xù)體結構的方法,例如使用正壓或通過肌腱線,但是可以實時確定鏈接的曲率,而不僅僅是關節(jié)位置,是解決這一問題的主要障礙。但是,研究人員希望看到可塑性機器人的未來發(fā)展可以解決這個問題。
接下來,該研究團隊的主要目標是,完善機器人的運動學以提供一個強大而完整的系統(tǒng),使用戶可以協(xié)作重塑機器人,同時仍然達到機器人系統(tǒng)預期的精度。當前,可延展的機器人研究還是一個嶄新的領域,這為它的進一步開發(fā)和優(yōu)化提供了許多機會。



電廠關鍵技術研究及其應用”專題征稿通知.jpg)
開關設備關鍵技術”專題征稿.jpg)

配用電技術”專題征稿.jpg)

能技術及應用專題征稿.jpg)
.jpg)
.png)








