


- 頭條新型電動平車導航控制系統研究與實踐2021-09-07 作者:張濤 池學智 楊鳴亮 | 來源:《電氣技術》 | 點擊率:導語浙江交通職業技術學院的研究人員張濤、池學智、楊鳴亮,在2020年第7期《電氣技術》雜志上撰文指出,新型電動平車導航控制系統是采用基于紅外與視頻結合的導航系統,不需要專用軌道和磁條等導軌設施,在地面用油漆噴涂路線和工位符號,簡化施工要求和降低維護成本。其攝像頭的安裝不需要特殊設計,檢測地面標識,對像素的要求不高,數據處理簡單有效,結合紅外傳感,不需要額外的軌道設備就可以輔助判斷軌道跟蹤,基于控制器域網通信網絡的應用,進一步提高了系統的可靠性,配件選擇方便,可適用于電動平車的廠內、大噸位、慢速度的搬運工作。
電動平車(搬運車)一般體積較大,載重可達幾十噸,采用遙控操作或者專人駕駛,故存在體積大、超重量、駕駛困難以及安全防護的問題。
為了解決搬運平車的問題,本研究提出一種基于紅外技術與視頻技術相結合的電動平車導航控制系統,可以實現電動搬運平車在廠區的自動運行,根據工位設定,自動尋軌,運行于設定好的工位,實現無人控制,并且具有防撞等功能,大大減少駕駛平車時存在的安全隱患,為電動平車的駕駛提供了很大的便利。
1 新型電動平車導航控制系統特點
電動平車主要用于廠房內的物品搬運,具有體積大、噸位高、安全系數要求高等特點。當前應用的導航方案主要有磁導航、紅外導航、激光導航等方案。磁導航在電動平車應用中需要鋪設專用的磁體軌道,在一些廠區里存在消磁的風險,并且軌道鋪設成本較高。
紅外導航軌道鋪設方便,但電動平車工作場所分為室內和室外,光照變化較大,平車的體積也較大,紅外導航干擾源很多,穩定性不夠,一般作為輔助導航;當前應用較多的是激光導航,但激光傳感器價格高昂,對安裝位置也有很多要求。
基于紅外與視頻結合的電動平車導航控制系統,只需要鋪設黑白相間的軌道,對光照和環境的抗擾度很好,成本較低;在標識軌道的協助下,計算機算法也較簡單,可以通過低檔的工控機實現;通過優化算法可以提高系統的抗擾度,并且可以輔助做各種位置控制,具有結構簡單、安全性高和成本較低的特點,非常適合電動平車的應用場合。
2 紅外和視頻導航控制系統的架構設計
本研究提出的基于紅外與視頻結合的電動平車導航控制系統,可以實現電動搬運平車在廠區的自動運行,可以根據工位設定,自動尋軌,運行于設定好的工位,實現無人控制,并且具有防撞等功能。主要架構如圖1所示,包括攝像頭、紅外傳感器、控制板、驅動板、雷達防撞檢測、地面路線和工位標識等設備。
圖1 導航控制系統架構圖
攝像頭主要拍攝地面路線和工位標識,轉換成數字信號傳遞給控制板進行處理。由于電動平車的體積特別大,并且要滿足前進和后退兩個方向運動,所以采用前后雙攝像頭的方案,可以保障車輛穩定可靠地運行。
廠房具有環境復雜多變的特點,一般廠家要求具備兩種導航手段,以提高電動平車運行可靠性。本研究主導航采用視頻信號處理,配備紅外傳感器導航作為補充,增加防撞信號處理、路線和工位設定等功能,通過控制器域網(controller area network, CAN)總線連接車輛控制器實現平車的運行控制。
車體四周配備雷達系統,主要用于防撞信號采集,通過CAN總線連接控制板。控制系統通過CAN通信,將各個功能部分進行連接。
電動平車工作時,控制器通過輸入設備設定行進路線和工位停留時間等信息,通過攝像頭獲取地面路線和工位標識,紅外傳感器主要是跟蹤地面軌道的作用,起輔助導航的功能;系統經過數據處理,進行自動軌道辨識,把電機驅動信號通過驅動板發送給傳動電機,實現電動平車的自動導航運行;平車通過雷達進行周邊物體檢測,實現防撞功能。
3 視頻處理程序設計
視頻導航為系統的主導航,為主要設計對象,控制系統采用一體機式的計算機,可以安裝操作系統,便于視頻的軟件處理、軌道辨識;系統采用100M像素的攝像頭,進行軌道判斷和工位圖標的識別,控制系統根據視頻處理的結果進行電機驅動配置,以實現電動平車的自動尋軌運行。
3.1 視頻處理程序架構
變壓器攝像頭采集圖像信息,傳遞給控制系統,控制系統需要對圖形進行處理,處理過程主要為圖形的灰度色處理、軌道形成(二值化處理)、切線軌跡判斷、運行方向辨識、電機驅動信號生成等幾個步驟,其中二值化處理、切線軌跡判斷為關鍵步驟。程序的處理流程如圖2所示。
圖2 視頻處理程序流程
軌跡處理是程序的關鍵技術,本研究采用OTSU算法的二值化處理技術;切線判斷主要采用處理好的軌跡進行切線的求值,切線算法為固定長度的橫向偏差,如圖3所示,計算出偏差值ef,根據偏差的大小和正負,判斷車輛需要行進的方向,作為車輛的預設方向值;車輛方向控制以預設方向值作為參考,采集車輛輪架電機偏轉的方向值進行閉環的控制,預設方向值為Dr,采樣的方向值為Ds,方向偏差為Ed,相互關系為
公式(1)
根據偏差進行比例積分微分控制,以實現穩定快速的方向控制。
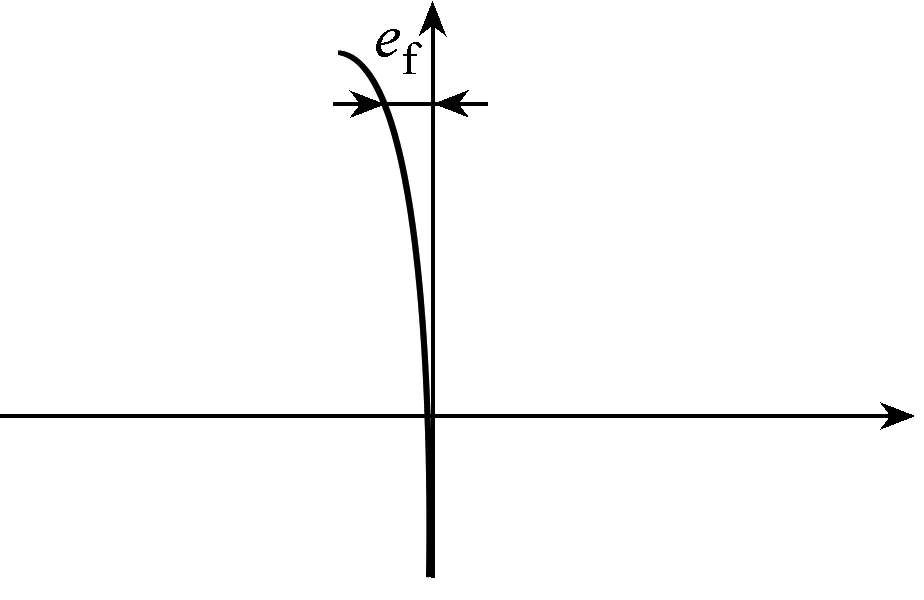
圖3 軌跡切線判斷
3.2 二值化處理
二值化處理是對獲得的灰度色圖形進行處理,以獲得真實的軌跡圖形,采用二值化算法,獲得邊界曲線,也是采集的運行曲線;實際工廠環境具有軌跡存在污點、顏色偏差、圖形干擾、光線偏差等多種情況,本研究采用OTSU算法進行處理。
OTSU算法是由日本學者OTSU于1979年提出的一種對圖像進行二值化的高效算法,是一種自適應的閾值確定的方法,又稱大津閾值分割法,是最小二乘法意義下的最優分割。
本研究中算法的重點是選擇合適閥值,進行邊界辨識,而OTSU算法能夠較好地解決這個問題,根據地面的軌道圖形,可以有效分析污點、陽光對軌道的影響,本研究的軌道橫坐標分為300個采樣點,灰度值取值范圍為0~200;根據OTSU算法計算出最優的閥值,判斷軌道的邊界,灰度值一半的分布如圖4所示。
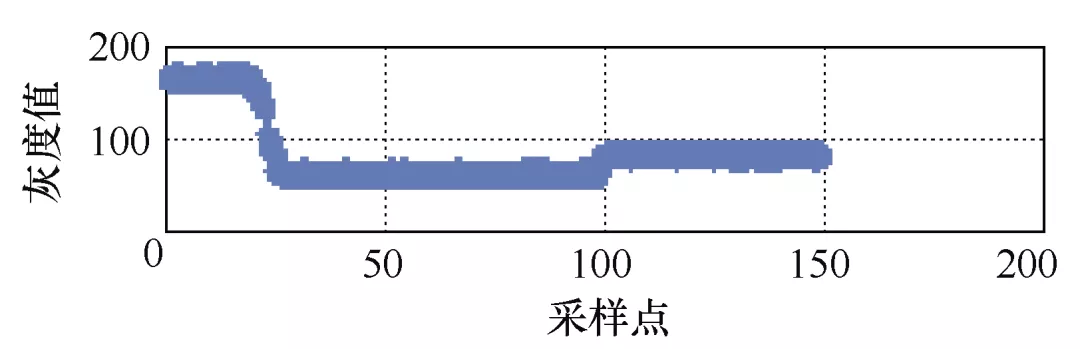
圖4 圖形一半的灰度值分布
在算法設計中,Matlab中自帶OTSU算法,調用即可
公式(2)
代碼如下:
1 close;clear;clc;
2 I=im2double(imread('coins.png'));
3 k=graythresh(I); %得到最優閾值
4 J=im2bw(I,k); %轉換成二值圖,k為分割閾值
5 subplot(121);imshow(I);
6 subplot(122);imshow(J);
4 實驗結果
根據上文分析過程進行了實驗樣機的設計,軌道鋪設黑白相間的油漆,方便攝像頭的拍攝,也可以連接紅外傳感器,攝像頭采用常用的720P或1080P高清接口,攝像頭拍攝軌道發送給小型工控機,目前使用10寸工控觸摸一體機,配置N2853賽揚雙核,2G內存,32G硬盤;工控機通過算法計算出工作要求,發送給比例閥(PRM2-06,通徑06,壓力至32MPa,流量至40L/min)。
控制系統包含普通攝像頭、紅外傳感器、工控機、驅動板卡等設備,總成本不超過2000元人民幣,量產后成本會進一步下降,具有低成本的優勢。
視頻處理采用二值化處理,獲得的軌跡圖形如圖5所示,可以對陽光干擾、圖形偏差等情況進行處理。
圖5 二值化處理結果圖
采用視頻處理的技術,搭建10t的電動平車實驗條件,實現10km/h的運行效果,具體車輛和軌跡如圖6所示。

圖6 電動平車軌道運行
5 結論
本文提出的基于紅外與視頻結合的電動平車導航控制系統,只需要鋪設黑白相間的軌道,對光照和環境的抗擾度很好,成本較低;在標識軌道的協助下,計算機算法也較簡單,可以實現電動平車上通過低檔的工控機實現;通過優化算法可以提高系統的抗擾度,并且可以輔助進行各種位置控制,具有結構簡單、安全性高和成本較低的特點,非常適合電動平車的應用場合。
通過研究及實驗驗證,發現電動平車體積大、噸位重,轉向和速度控制需要精確的控制模型,本課題組將繼續深入研究電動平車自動導航的建模方法以及控制算法。



電廠關鍵技術研究及其應用”專題征稿通知.jpg)















